4. 实时控制界面
用于实时控制机械臂的位置,调整机械臂的运动姿态,末端工具,轨迹录制等。 
4.1 末端执行器
软件支持的末端执行器有:机械爪、真空吸头(插接式和触点式)、xArm BIO机械爪、Robotiq-2F-85机械爪、Robotiq-2F-140机械爪。
默认为无末端执行器。 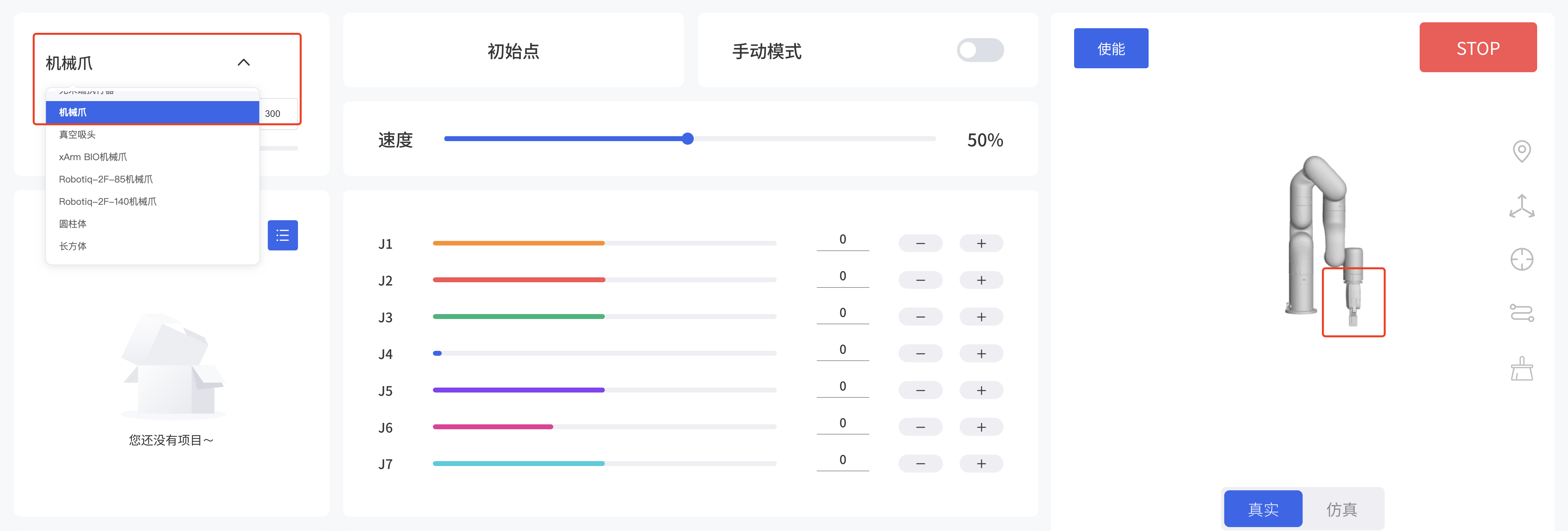
选择对应末端执行器时,若检测到当前机械臂波特率和默认末端执行器波特率不符,弹框提示用户选择设置为默认波特率,点击是即可保存。例如:xArm机械爪默认波特率为2000000,Robotiq机械爪默认波特率为115200。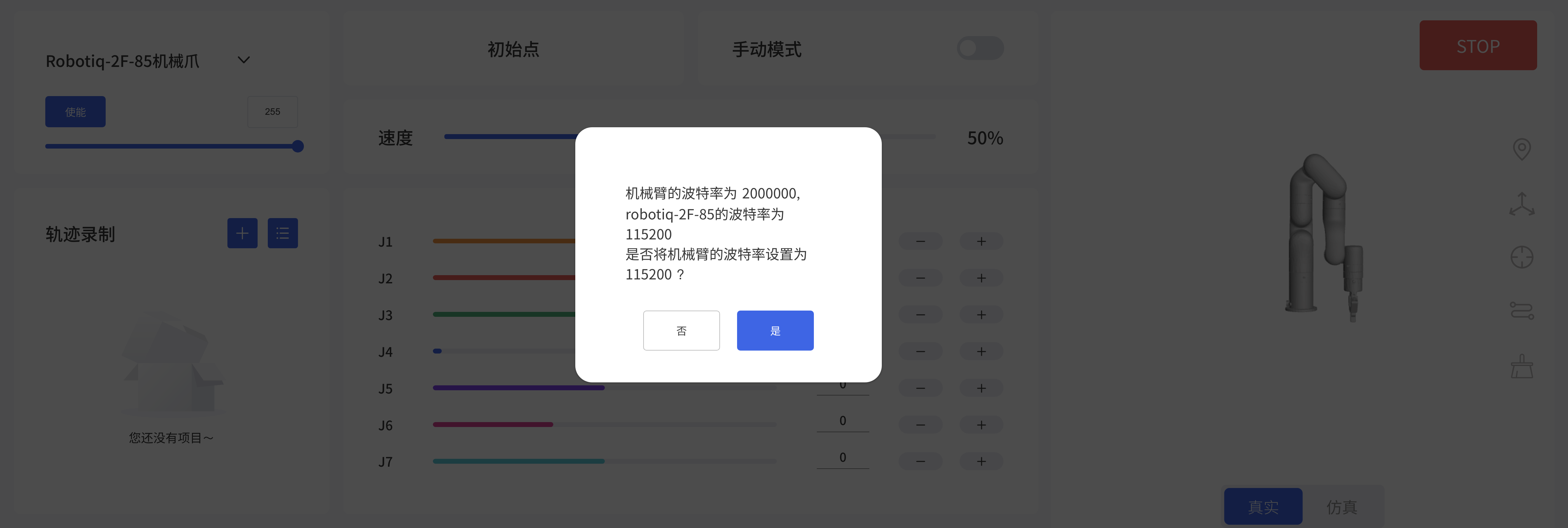
支持自定义圆柱体和长方体,如下图: 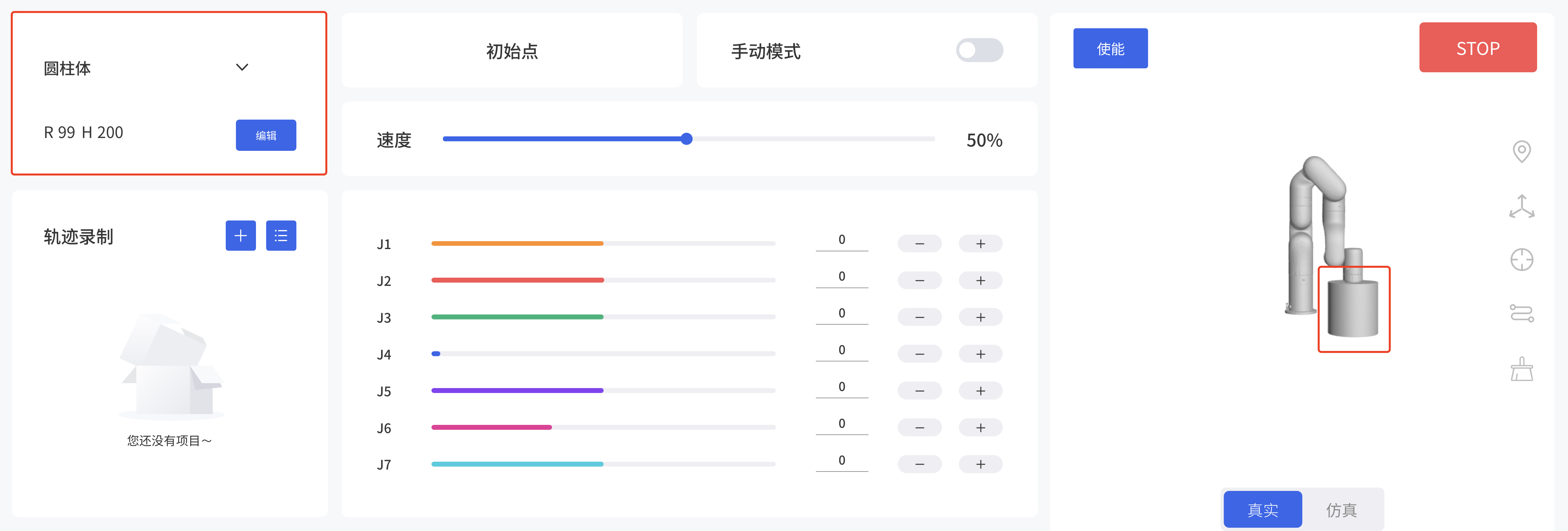
4.2 轨迹录制
用于记录并回放用户拖拽机械臂进行示教的轨迹,最长录制时间为5分钟,可设置轨迹回放倍数,录制好的轨迹可导入Blockly项目中。 
- 播放:播放当前轨迹文件。
- 暂停:暂停播放当前轨迹文件。
- 倍数:倍数播放,可选1倍,2倍,4倍。
- 循环次数:循环播放次数,最大为999次。
- 新建文件:单击后弹出菜单:输入轨迹名称,点击录制并拖动手臂(Lite6需要按住末端按钮),轨迹录制完成,单击保存按钮。
- 导入/删除文件:导入和删除选中的轨迹文件。
新建文件过程如图:
轨迹文件列表: 
4.3 产品基础信息
产品信息界面显示产品基础信息,如型号,机械臂IP,固件及软件版本,机械臂状态,模式,负载,安装方式等。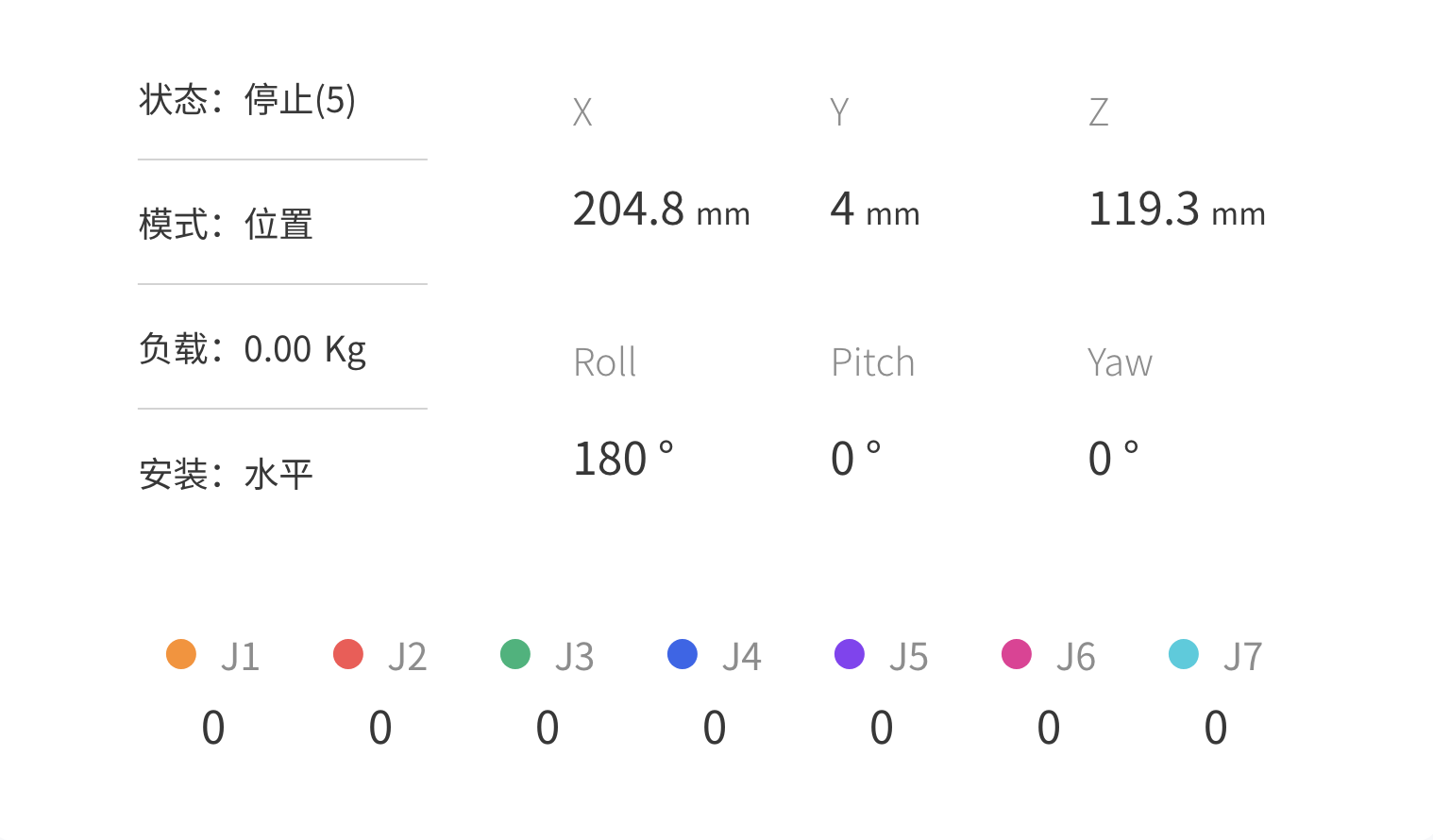
IP地址:显示当前机械臂控制器的IP。
模式:显示机械臂当前模式,默认为位置模式。
负载:显示手臂当前的负载参数,默认为0kg。
安装:显示手臂当前的安装方式,默认为水平。
位置信息:显示机械臂当前TCP坐标[X,Y,Z,R,P,Y]。若选择轴角显示方式,则为[X,Y,Z,Rx,Ry,Rz]。可在辅助功能中切换。
关节信息:显示机械臂各关节角度,单位为度。
4.4 位置和关节控制
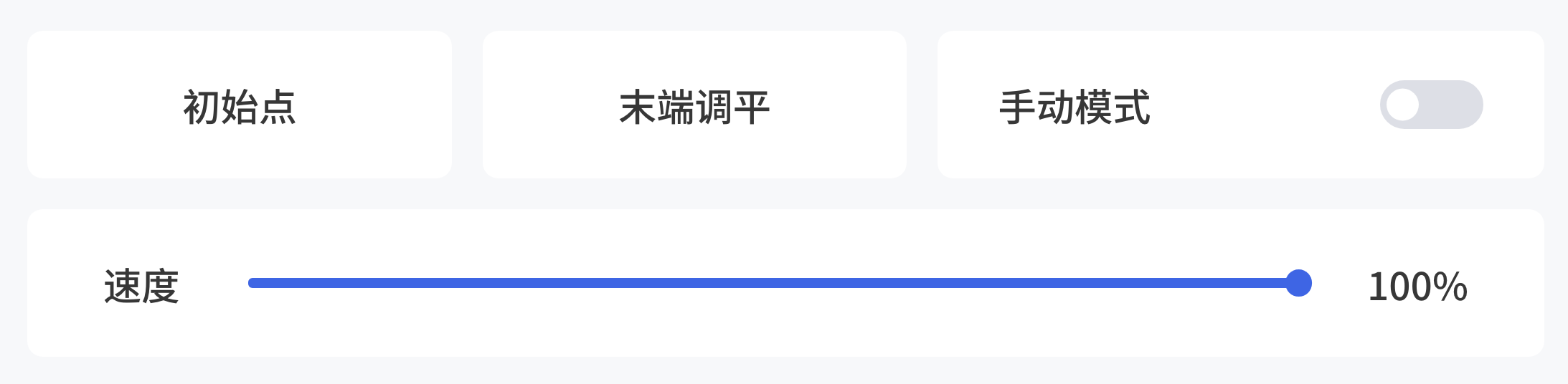 初始点:长按为连续运动,机械臂回到默认初始点位。点按为步进运动,可在设置-运动参数-基础参数-初始点位置中设置自定义初始点(关节坐标)。
初始点:长按为连续运动,机械臂回到默认初始点位。点按为步进运动,可在设置-运动参数-基础参数-初始点位置中设置自定义初始点(关节坐标)。
默认初始点:
- xArm/850:
[0,0,0,0,0,0,0] - Lite6:
[0,9.9,31.8,0,21.9,0]
危险:机械臂安装了末端执行器的情况下,如果要进行回零点操作时,请务必评估回零点路径会不会碰撞障碍物或者安装机械臂的固定面。
末端调平:将末端法兰调整为水平。长按为连续运动,点按为步进运动。(xArm7因构型问题暂时不提供此按钮)
手动模式:可手动拖拽机械部关节到达目标位置点。
- 1.开启手动模式前,请确保机械臂的安装方式和负载设置与实际符合,否则会有危险。
- 2.机械臂需要正确加载SN才能开启手动模式,可在设置-我的设备中查看软件获取的机械表SN。
- 3.查看并对比机械臂底座电源口贴的SN,与软件中的是否一致。
速度:用于条件实时控制界面机械臂的运动速度,默认为50% = 115mm/s,1% = 2.3mm/s, 100%=230mm/s。(此页面速度最大值不是机械臂真实的最大运动速度,如需让机械臂高速运行,可在Blockly运动程序中添加速度指令)
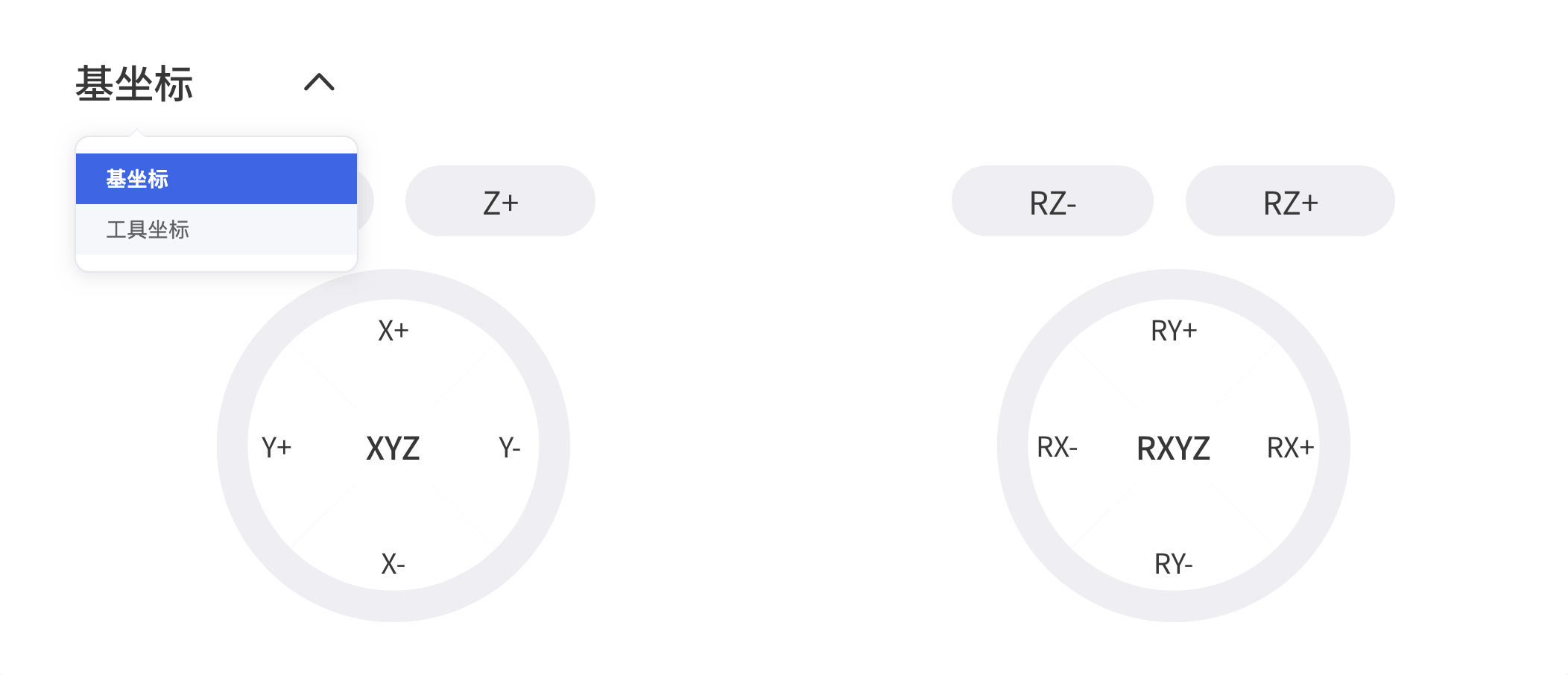 直线运动:用户可以基于基坐标系,工具坐标系来控制机械臂的运动状态。笛卡尔空间运动的机械臂使工具在点之间进行线性移动,这意味这每个关节都会执行更为复杂的移动,以使工具保持在直线路径上。目标点确认后,末端路径是唯一的,轨迹过程中对应的姿态是随机的。
直线运动:用户可以基于基坐标系,工具坐标系来控制机械臂的运动状态。笛卡尔空间运动的机械臂使工具在点之间进行线性移动,这意味这每个关节都会执行更为复杂的移动,以使工具保持在直线路径上。目标点确认后,末端路径是唯一的,轨迹过程中对应的姿态是随机的。
- 基坐标系XYZ控制工具的位置,单位是毫米(mm)。TCP坐标系的Roll/Pitch/Yaw控制工具的方向,单位是度(°)。
- 默认为轴角控制(Rx/Ry/Rz),可在设置-辅助功能中切换为RPY控制,如下图:
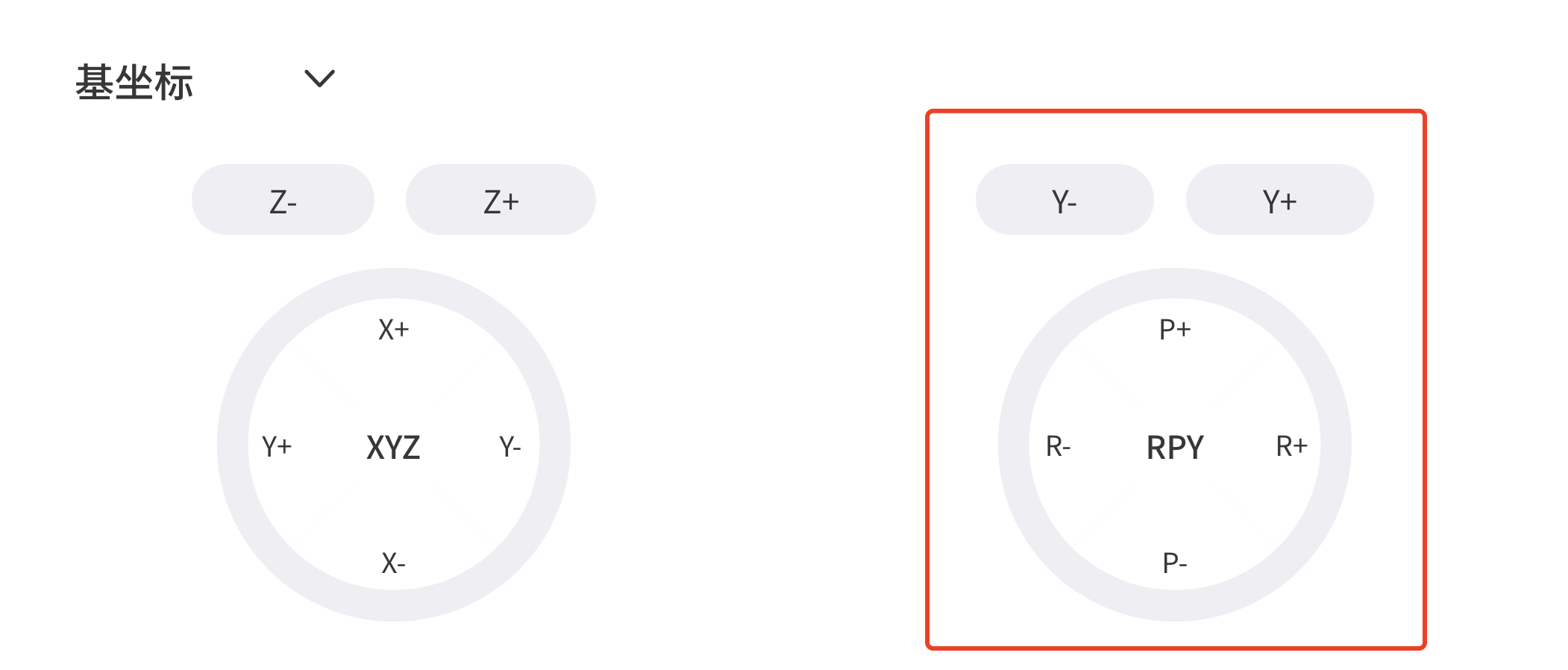
- 默认为轴角控制(Rx/Ry/Rz),可在设置-辅助功能中切换为RPY控制,如下图:
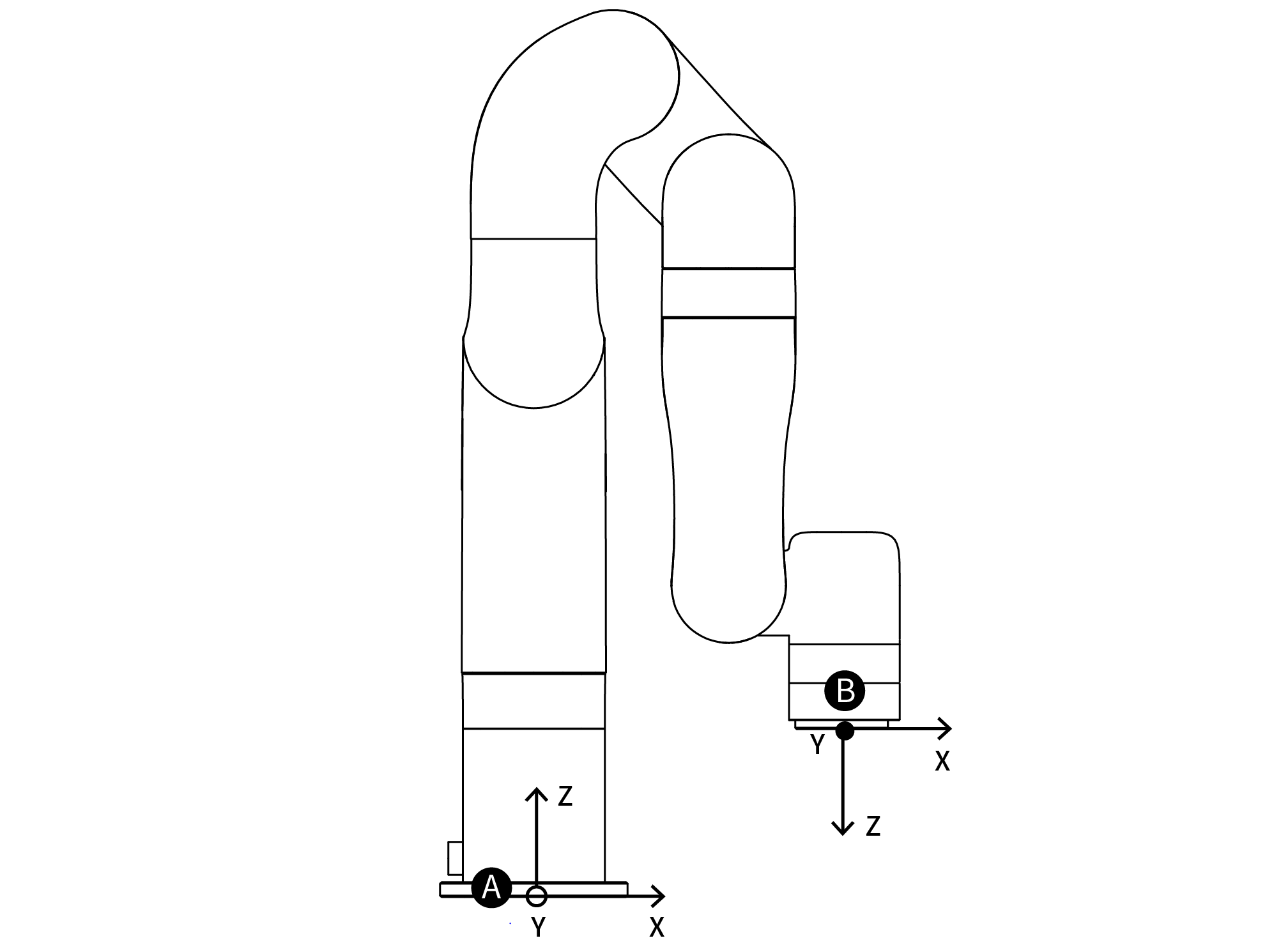
A:基坐标系 B:TCP坐标系
机械臂末端执行器法兰中心点(TCP)来定义的TCP坐标系,是依次绕基坐标系的X/Y/Z轴旋转[180°, 0°,0°]的结果。TCP坐标系的X/Y/Z空间指向会根据旋转角度的改变而改变。
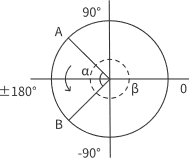
- Roll /Pitch/Yaw分别绕选定坐标系的X/Y/Z旋转,设置数值的±表示在旋转角度范围内圆的数值,其旋转方向会根据两点之间较小的角度方向旋转,这一点尤其要注意,严格控制两点之间的偏转角度大小来控制旋转方向,必要时在两点之间插入第三个点。如下图所示,如果要从位置点A偏转到位置点B,机械臂走的是α夹角方向,如果需要走β夹角方向,需要在β夹角之间插入新的位置点,而且要保证插入的位置点与A形成的夹角小于α。
- Roll/Pitch/Yaw三者的±180°在空间上的点是重合的,取值范围都为±180°,所以机械臂上报位置时,±180°都有可能。
- RPY [rad] 滚动角、俯仰角和偏航角 (RPY)。RPY 旋转矩阵(X、Y、Z 旋转)由以下公式确定:
A:基坐标系 B:TCP坐标系
危险:机械臂在记录笛卡尔位置点前必须检查TCP偏移量。
关节运动:机械臂通过协调每一个关节的旋转角度来控制末端执行器的位置,末端轨迹不是直线,速度单位是°/s。目标点确定之后,末端路径和轨迹过程中对应的姿态都是唯一的,目标点有多个关节联动时,完成这条指令每个关节用时一样。
长按为连续运动,点按为步进运动。
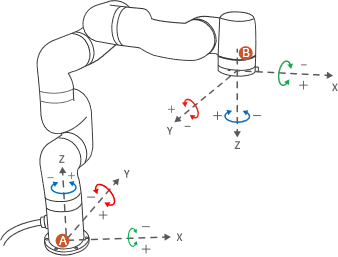
进度条:显示当前关节可移动范围。  确定关节旋转方向,可参考下图:
确定关节旋转方向,可参考下图: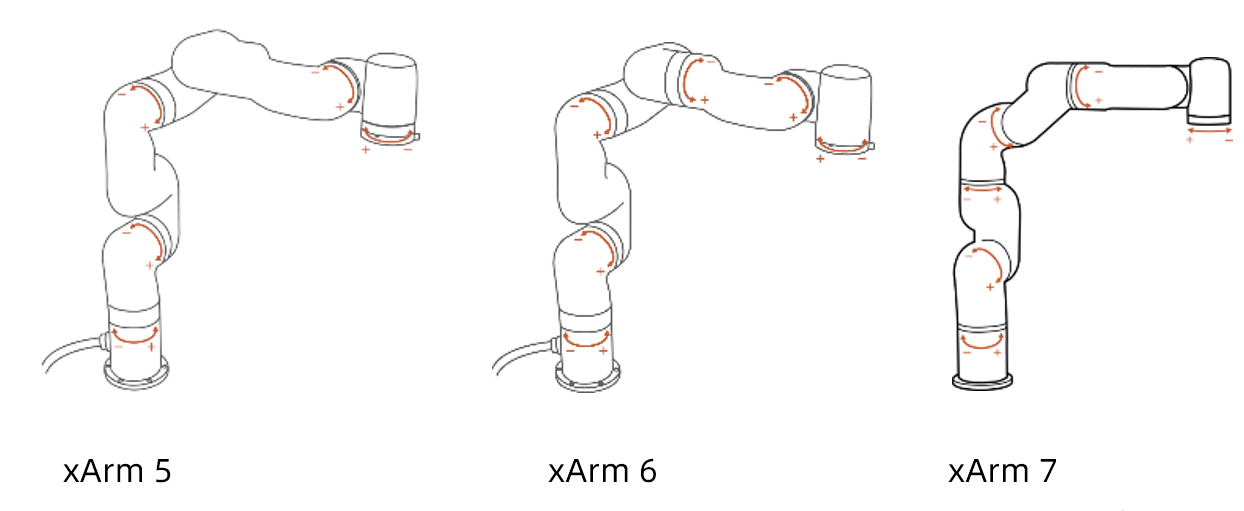
4.5 使能和STOP按钮
 使能:使能机械臂各关节,使能成功后,该按钮消失。
使能:使能机械臂各关节,使能成功后,该按钮消失。
STOP:机械臂立刻停止运动并清除所有缓存指令,不会断机械臂的使能状态。软急停。
4.6 仿真与真实机械臂
两种模式均需要连接真实机械臂。当切换为仿真机械臂时,真实机械臂不运动。但在仿真模式下设置的参数,应用于真实机械臂。
例如,在仿真模式下设置TCP负载为0.6kg,切换回真实机械臂时负载也为0.6kg。 ![[simrobot_cn.png]](/assets/simrobot.DiBJYgIh.png)
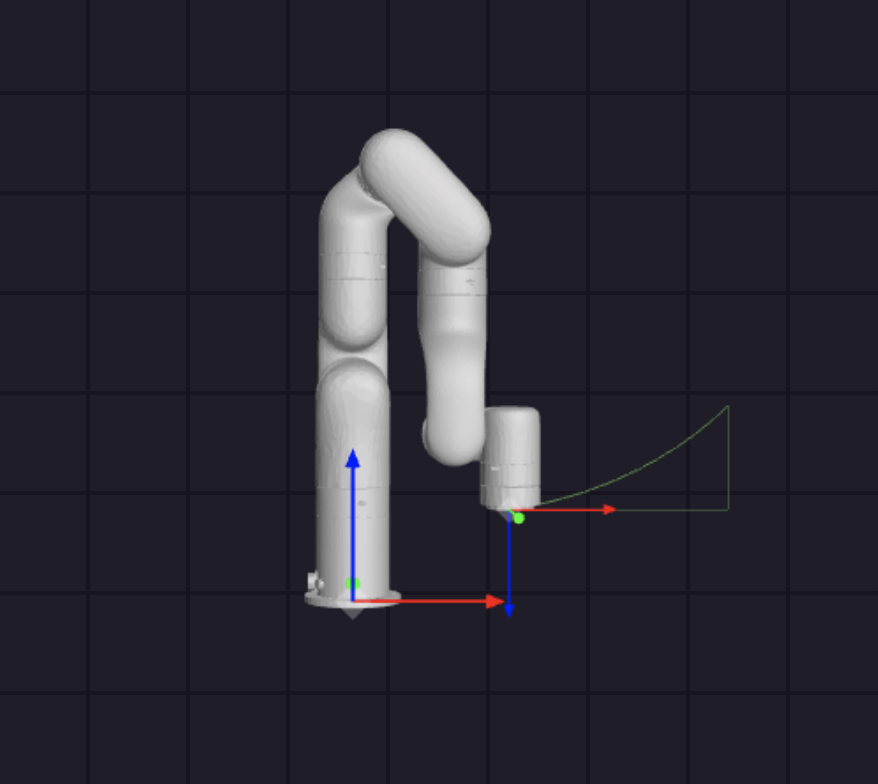
- 重置视角:将3D视图视角设置为默认状态。
- 基坐标::显示当前基坐标系。
- 工具坐标:显示当前工具坐标系。
- 绘制轨迹:绘制机械臂运行轨迹。
- 清除轨迹:清除已绘制的轨迹。
如下图,显示基坐标与工具坐标,绘制轨迹。