5. Blockly界面
Blockly是一个图形化编程工具,可以通过拖拽代码块的方式编程来控制机械臂,无需手动编写代码。
5.1 页面简介
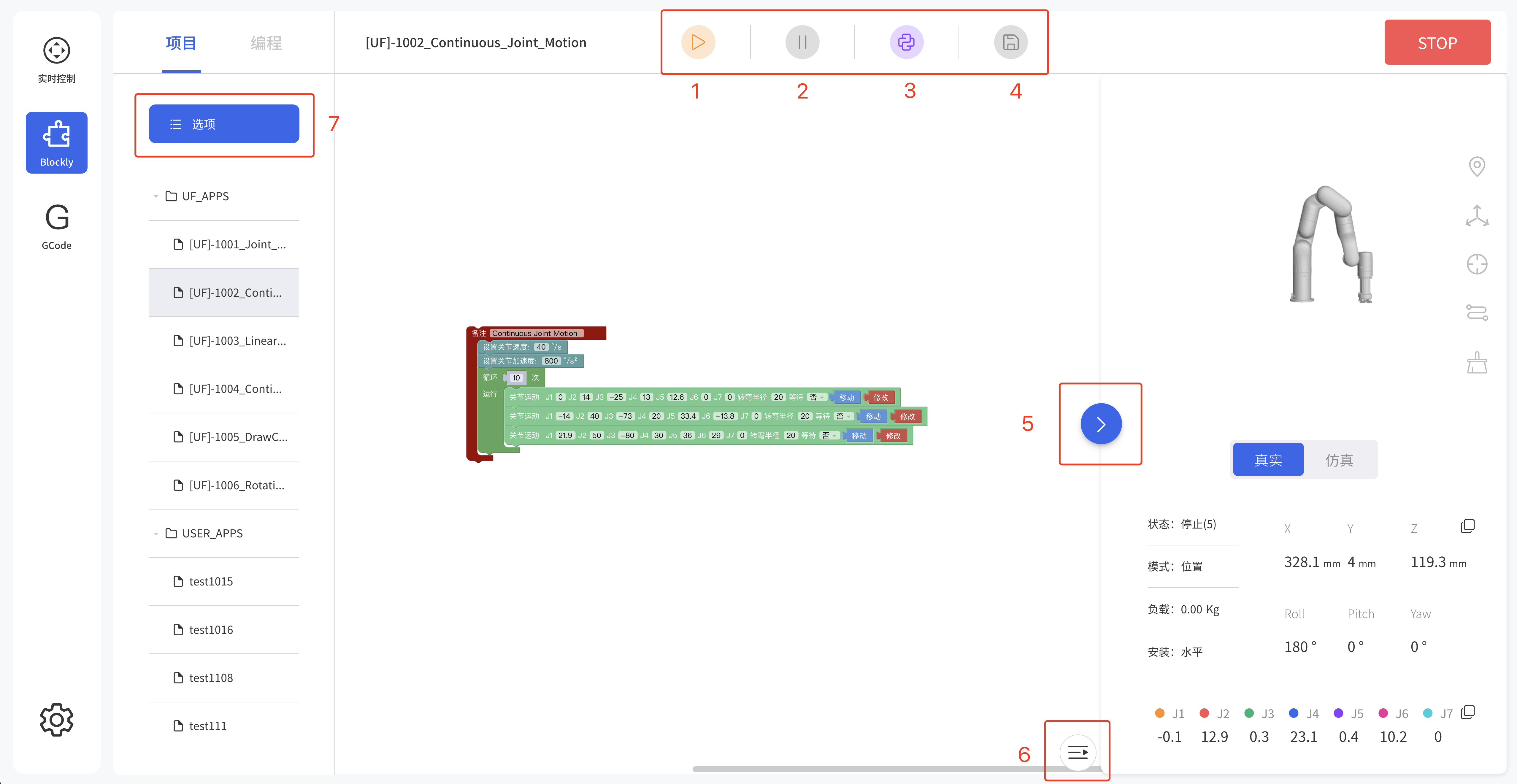
- 运行:运行当前Blockly项目。
- 暂停:暂停正在运行的Blockly项目。
- 转Python:跳转到Python IDE模块。
- 保存:保存对Blockly项目的更改。
- 缩放日志区:隐藏/显示日志区域。
- 缩放3D区:隐藏/显示3D模型区域。
- 文件操作:新建、导入、下载、复制、重命名、删除。
5.2 Blockly工作区
将代码块拖入到操作面板,代码块执行的顺序是自上而下,从左至右,可同时拖拽改代码块后面连着的代码。拖拽代码块到左边非工作区删除,或者可以选择代码块后按键盘Enter/Delete键。 ![]()
- 重置:页面回到默认大小和代码块居中位置。
- 放大:放大代码块。
- 缩小:缩小代码块。
工作区右键功能
在非代码块的空白工作区右键,功能主要针对所有的代码块: 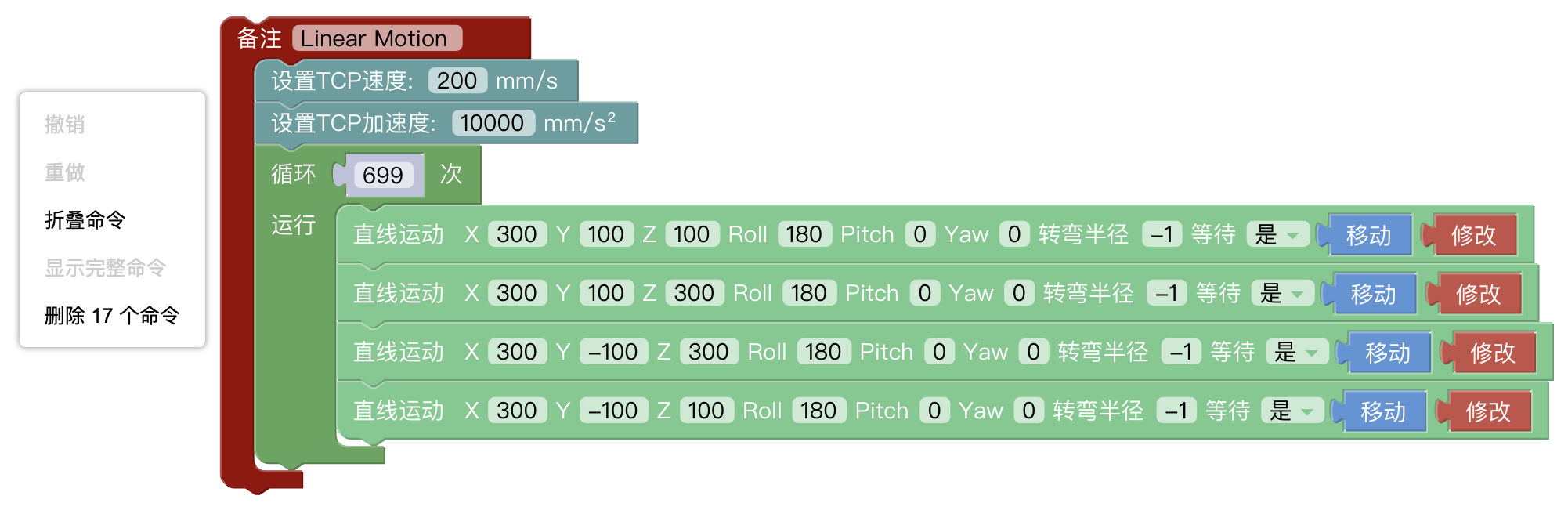
- 撤销: 撤销上一次的操作。
- 重做: 还原上一次撤销的操作。
- 折叠命令: 折叠所有代码块。
- 显示完整命令: 显示所有折叠的代码块。
- 删除命令: 删除代码块。
移动/修改代码块
 点击修改,弹出实时控制界面,可重新编辑当前指令的运动坐标。
点击修改,弹出实时控制界面,可重新编辑当前指令的运动坐标。
长按移动按钮,使机械臂移动到当前指令的位置点。点击保存,保存更改。
注意:
- 在一段指令里面,有顺序A/B/C/D...等多个点,如果点击移动让机械臂从A点位置跳过B点直接到C点或者C点以后的位置,为避免损害周边设施,必须要进行安全评估。
- 因为笛卡尔指令的复杂性,笛卡尔空间轨迹规划,需要做逆运动学求解。因而可能存在无解、多解、逼近解的情况。从A点到B点走笛卡尔指令时的解不理想时,必要时在两点之间插入第三个关节指令。
5.3 Blockly编程
5.3.1 设置
 设置TCP速度: 设置直线运动的速度,单位是mm/s。 参数范围:xArm/UF850:0-1000, Lite6:500
设置TCP速度: 设置直线运动的速度,单位是mm/s。 参数范围:xArm/UF850:0-1000, Lite6:500
设置TCP加速度: 设置直线运动的加速度,单位是mm/s²。参数范围:1-50000
设置关节速度: 设置关节运动的速度,单位是°/s。参数范围:0-180
设置关节加速度:设置关节运动的加速度,单位是°/s²。参数范围1-1146
设置TCP负载:设置当前项目的负载,下拉列表引用TCP负载。
设置TCP偏移:设置当前项目的末端偏移,下拉列表引用TCP偏移。
设置坐标系偏移:设置当前项目的基坐标偏移,下拉列表引用坐标系偏移数据。
设置碰撞灵敏度:默认为3,参数范围:0、1、2、3、4、5
重置计数器:该指令将控制器内的计数器重置为0。
计数器自增:每次执行到该指令时会使控制器的计数器自增1。
获取计数器:获取计数器的值。
当计数器(>)(0)执行:when执行事件,满足条件时执行。
5.3.2 运动
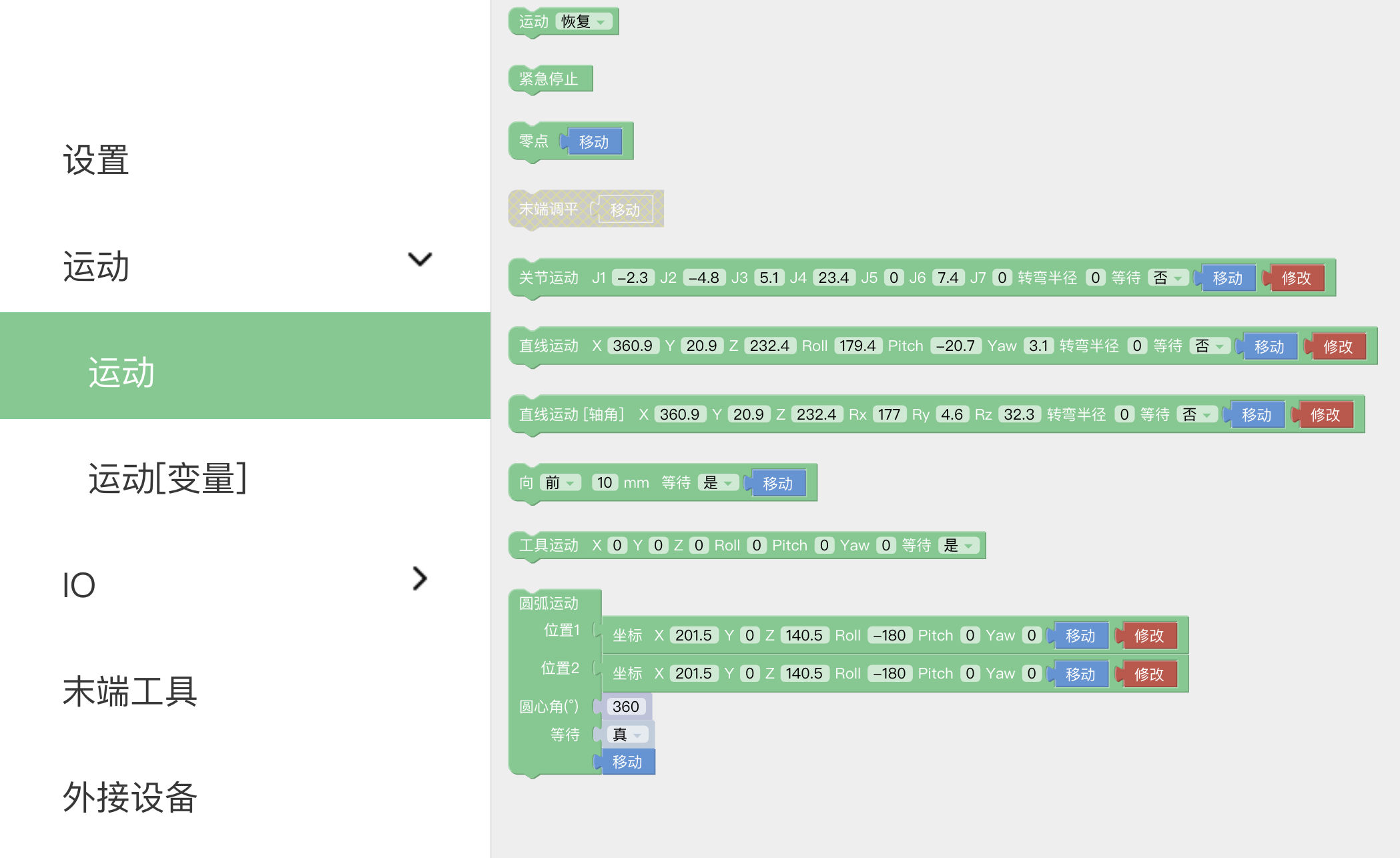 运动(恢复):设置机械臂的状态。可选参数:恢复、暂停、停止。停止将退出程序。
运动(恢复):设置机械臂的状态。可选参数:恢复、暂停、停止。停止将退出程序。
紧急停止:机械臂立即停止运动,退出Blockly程序并清空所有缓存指令。
零点:机械臂回所有关节值都为0的姿态。
末端调平:将末端调整为水平。
关节运动:设置关节运动的各个关节值,单位是°。在真实机械臂模式下,从侧边拖出的关节运动指令数据是真实机械臂当前姿态数据。
直线运动(XYZRPY):直线运动,姿态控制方式为RPY。
直线运动[轴角](XYZRxRyRz):直线运动,姿态控制方式为轴角。
向前:机械臂基于当前位置做相对运动,单位是mm。可选参数:前、后、左、右、上、下 。 工具运动(XYZRPY):机械臂相对于工具坐标系做相对运动。
圆弧运动:表示位置1到位置2走圆弧运动,但该命令前面还需再加入一个位置点,三点确定一个圆,单位是mm。圆心角:该圆弧的度数,设置360°时可以走完一整个圆弧。(注意:要想实现平滑的轨迹运动,需要设置等待=假)
支持输入变量的运动:
与上面的运动代码块功能相似,可输入的值支持变量,方便客户编程。
例如下图,将X设置为变量。 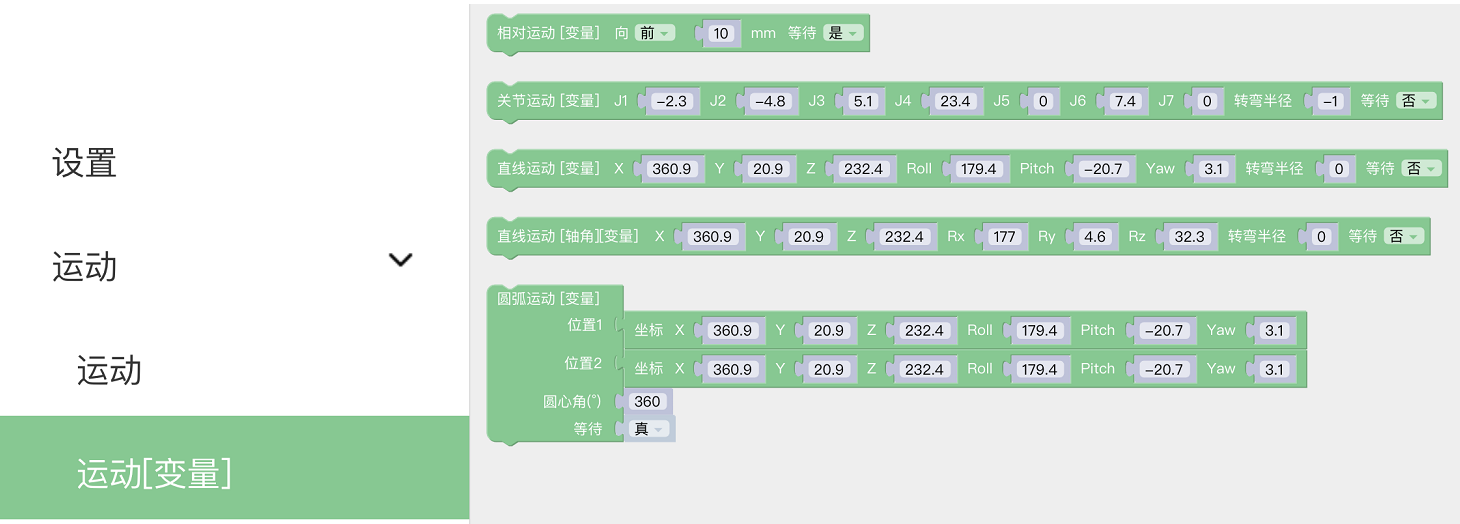
5.3.3 IO
5.3.3.1 控制器IO
xArm/UF850有16个数字输入、16个数字输出、2个模拟输入、2个模拟输出。
Lite6有8个数字输入、8个数字输出、2个模拟输入、2个模拟输出。
控制器数字输入IO为低电平触发。 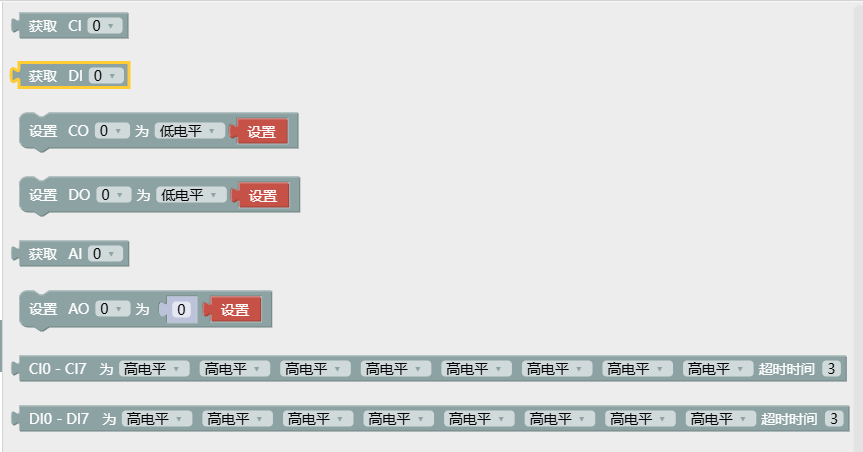 获取CI(0): 获取CI0-CI7的值。返回:0或1
获取CI(0): 获取CI0-CI7的值。返回:0或1
获取DI(0): 获取DI0-DI7的值。返回:0或1
设置CO(0)为(低电平): 设置(CO0-CO7)为(低电平/高电平),点击设置可单独执行该指令。
设置DO(0)为(低电平): 设置(DO0-DO7)为(低电平/高电平),点击设置可单独执行该指令。
获取AI(0):获取AI0、AI1的值。返回:0-3V
CI0-CI7为(高/低)电平,超时时间(3): 判断CI0-CI7的值,满足条件时执行事件。当超过超时时间(3)s仍不满足条件时,执行下一条代码块。
DI0-DI7为(高/低)电平,超时时间(3): 判断DI0-DI7的值,满足条件时执行事件。当超过超时时间(3)s仍不满足条件时,执行下一条代码块。
位置触发:
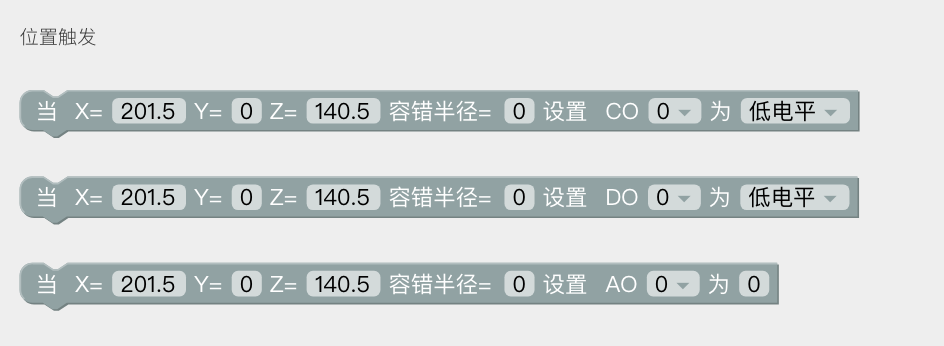
- 当机械臂到达指定位置时,以触发位置点(X,Y,Z)为中心指定的球面体区域(球面体半径为容错半径)触发IO。该指令可用于在特定位置触发IO的场景。
- X,Y,Z 代表机械臂要到达的指定位置的坐标值,单位毫米。
- 容错半径是指,TCP位置触发的数字IO操作中,以触发位置点为中心指定一个球面体区域,只要系统检测TCP位置进入这个附近区域时即触发IO。如果不设置容错半径,则机械臂以非0的速度通过指定点时可能因无法准确检测到而导致漏触发。
事件:

- 当(CI0-CI7)为(高电平/低电平)时执行:当条件满足时执行该代码块包含的指令。
- 当(DI0-DI7)为(高电平/低电平)时执行:当条件满足时执行该代码块包含的指令。
- 当(AI0/AI1)(=)(0)时执行:当监听的模拟IO数值满足条件时执行代码块包含的指令,条件有 =,≠,>,≥,<,≤ 。
- UFactory studio的IO触发逻辑:
当(when,跳变触发): 每100ms获取一次IO状态,将第一次获取到的状态作为初始值。从第二次获取到的IO状态与上一次获取的IO状态比较,有变化时触发满足条件的回调。
如果(if,水平触发): 第一次检测到IO状态满足条件时,触发满足条件的回调。
5.3.3.2 工具IO

可参考控制器IO的代码块,功能相似
5.3.4 末端工具
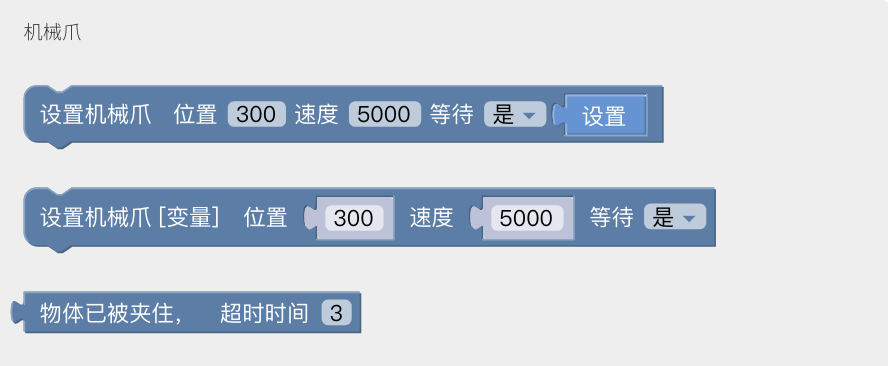
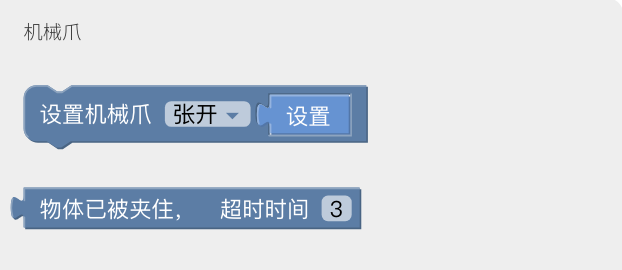
机械爪
软件自动检测手臂类型,并显示对应代码块。
- xArm/UF850:设置机械爪位置、设置机械爪位置(变量)、物体已被夹住。 位置:-10~850,速度:1000~5000
- Lite6:设置机械爪张开、物体已被夹住。 可选参数:张开、闭合、停止
BIO机械爪
初始化机械爪,设置BIO机械爪打开、检测BIO机械爪已经夹住物体。
机械爪使用时必须先进行初始化。 速度:200-2400 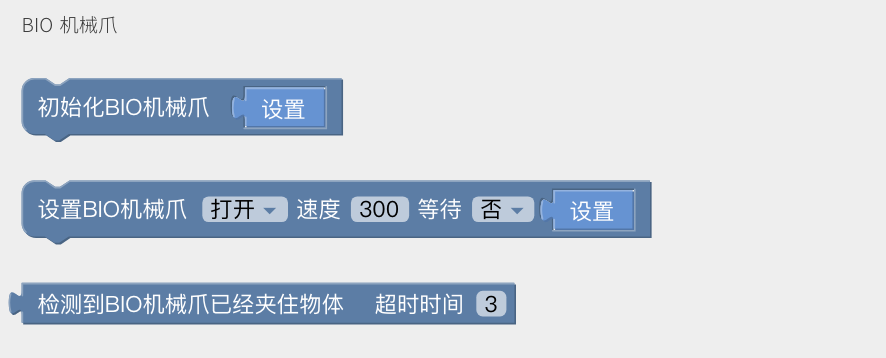
Robotiq机械爪
初始化Robotiq机械爪、设置Robotiq机械爪位置/速度/力度。
位置:0-255,速度:0-255,力度:0-255 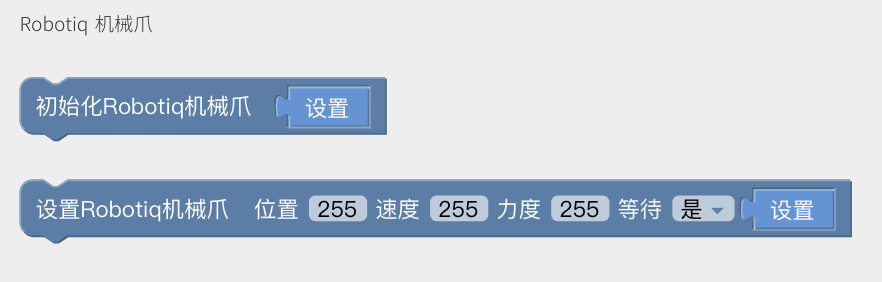
真空吸头
获取真空吸头状态:返回0或1。 0:吸住 1:释放
检测到物体已经(吸住):吸住或释放,超过超时时间不满足条件则执行下一个代码块。
设置真空吸头(开)是否拾取检测(否):打开或关闭吸头。 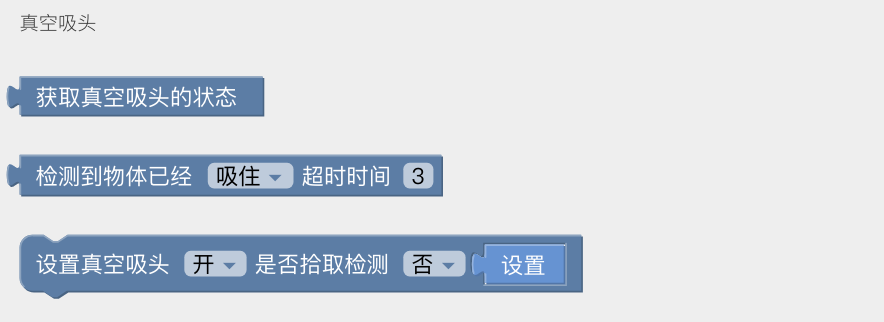
5.3.5 外接设备
直线滑轨
当手臂检测到连接了滑轨时显示此代码块,否则不可使用。 设置直线滑轨:位置、速度。 
Modbus RTU
设置/获取RS-485端口Modbus RTU指令: 机械臂/控制盒。
仅支持标准ModbusRTU,会在输入的指令后自动加CRC。 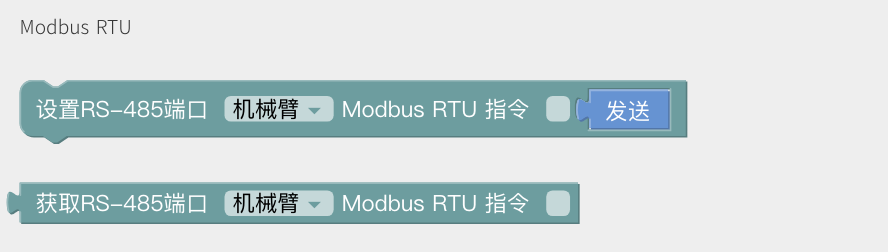
例如:控制xArm机械臂开到位置600,并获取当前位置。 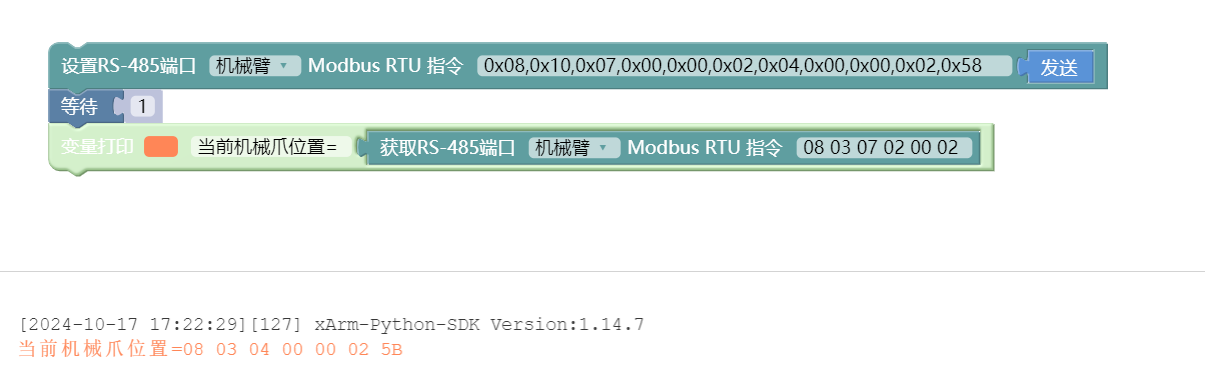
力矩传感器
设置力矩传感器力控制: 坐标系:基坐标、工具坐标。 力方向:Fx,Fy,Fz,Tx,Ty,Tz。 力大小:Fx(-105,105) Fy(-105,105) Fz(-140,140) TxTyTz(-2.8,2.8) 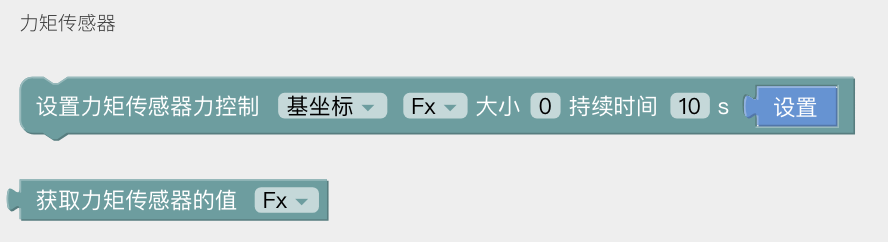
Modbus TCP
Modbus TCP寄存器定义请参考:Modbus TCP寄存器 当保持寄存器地址()为()时执行:需要检测到该寄存器地址的值有跳变,则触发事件。 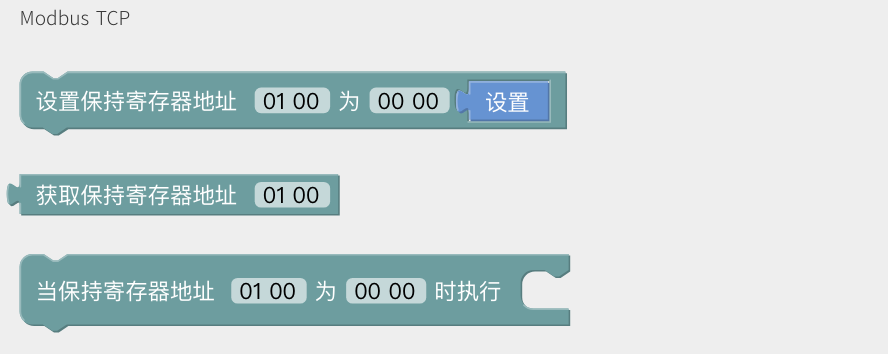
例如下图,将寄存器01 A0的值设置为12 34,触发手臂运动。 
5.3.6 导入
可支持导入轨迹文件、Blockly工程、Gcode代码。可选择运行次数。
点击运行可单独执行对应的文件项目。 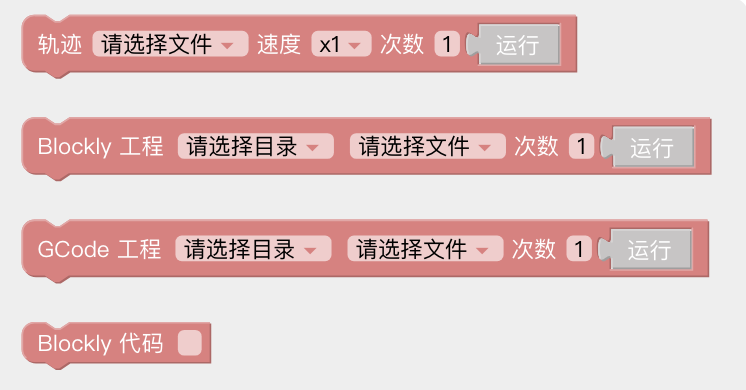
5.3.7 逻辑
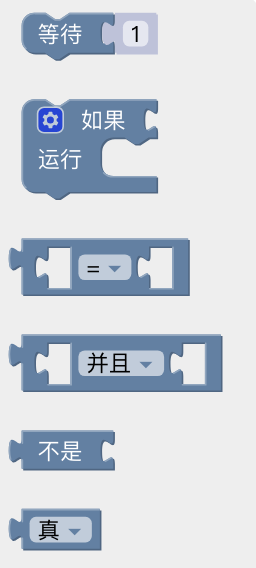
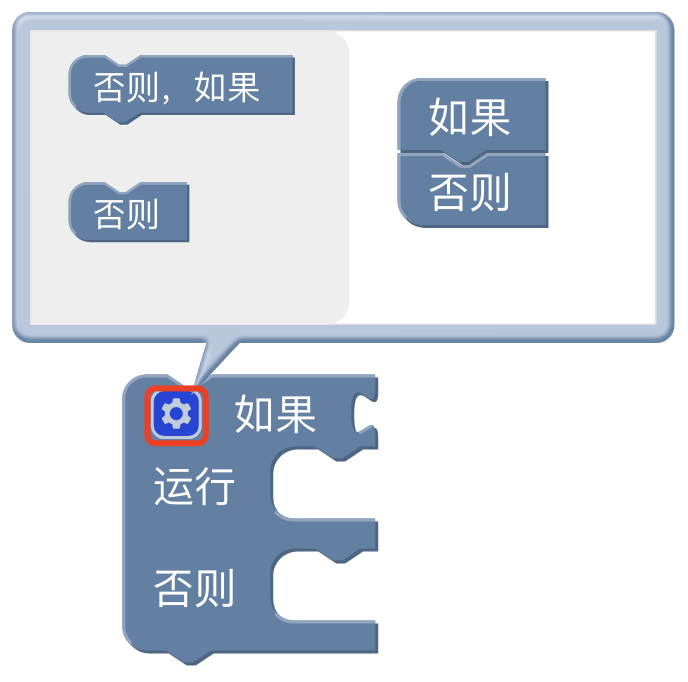
等待: 等待()秒后发送后面的指令。 如果() 运行():如果条件成立,则会运行指令,否则就跳过。 如果/否则语句的设置:
- 点击运行命令块上的设置按钮,然后命令块会弹出一个选择框;
- 将上图中否则代码块拖到右边如果代码块下方,使两个代码块结合;
- 此时点击设置按钮,选择框收回,如果/否则语句设置完成,如下图:
5.3.8 循环
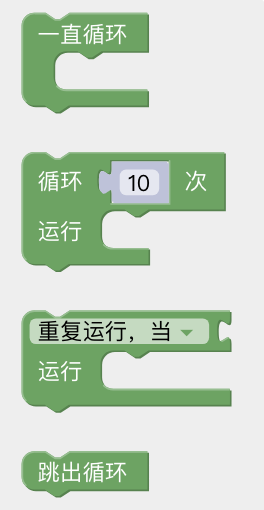
一直循环 :里面包含的指令无限循环。 循环() 运行:循环()次里面包含的指令。 重复运行,当:当条件不成立时,跳出循环。 跳出循环:终止循环。
5.3.9 运算
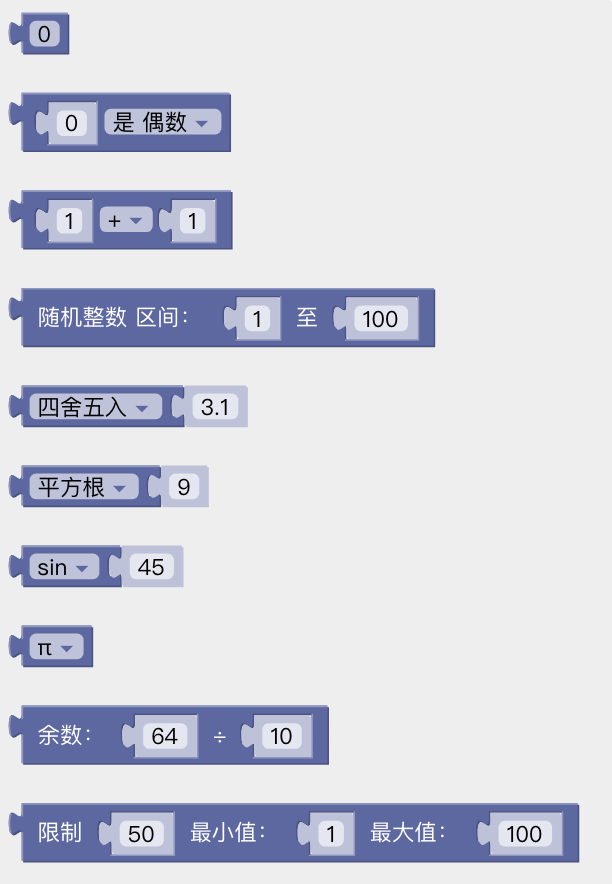
可使用上面的代码块做加减乘除,指数运算等一些复杂的运算。
5.3.10 进阶
文字
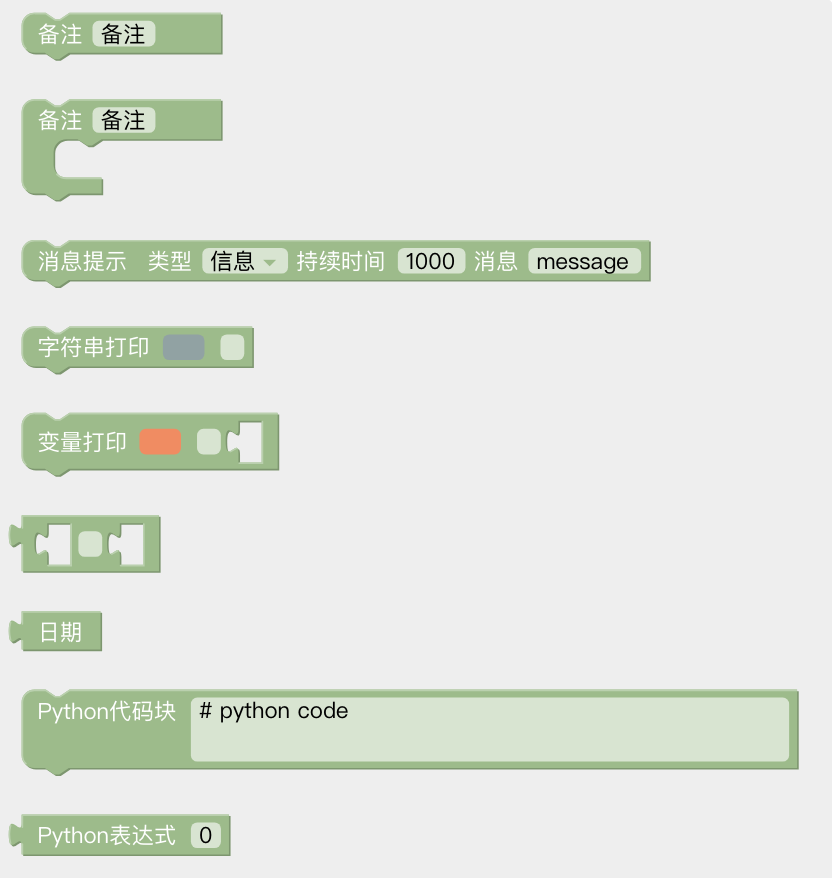 备注:备注该代码块,起指示作用,可改变颜色。
备注:备注该代码块,起指示作用,可改变颜色。
消息提示:类型(信息/成功/警告/错误),持续时间表示消息显示的时间,单位是秒(s);message表示提示的消息内容。
字符串打印:可在下方打印输入的字符串,并设置字体颜色。
变量打印:可打印添加的变量,并设置字体颜色。
日期:可输出运行该指令时的日期。
Python代码块:可以自定义编写python代码,使其变成Blockly中的一个块,并在程序中使用
Python表达式:可以自定义Python表达式。
变量
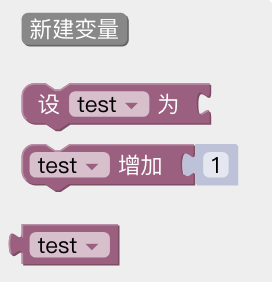
用户可以新建变量。变量操作:设置变量值、通过加减操作改变变量值。
可重命名变量、删除变量。
函数
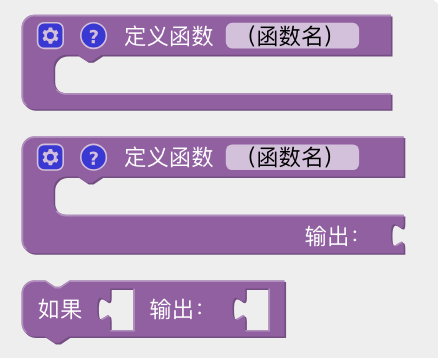
定义函数(函数名):可定义新函数,不带返回值。
定义函数(函数名)输出[]:可定义新函数,带返回值。
如果()输出():条件判断句,只能放在内置函数中。
注意:定义的函数要放在主程序的前面。
5.4 Python IDE模块
点击Blockly页面的图标进入到Python IDE页面。 Python IDE是Python开发集成环境,可直接使用xArm-Python-SDK API和查看Blockly项目自动转换的Python代码。 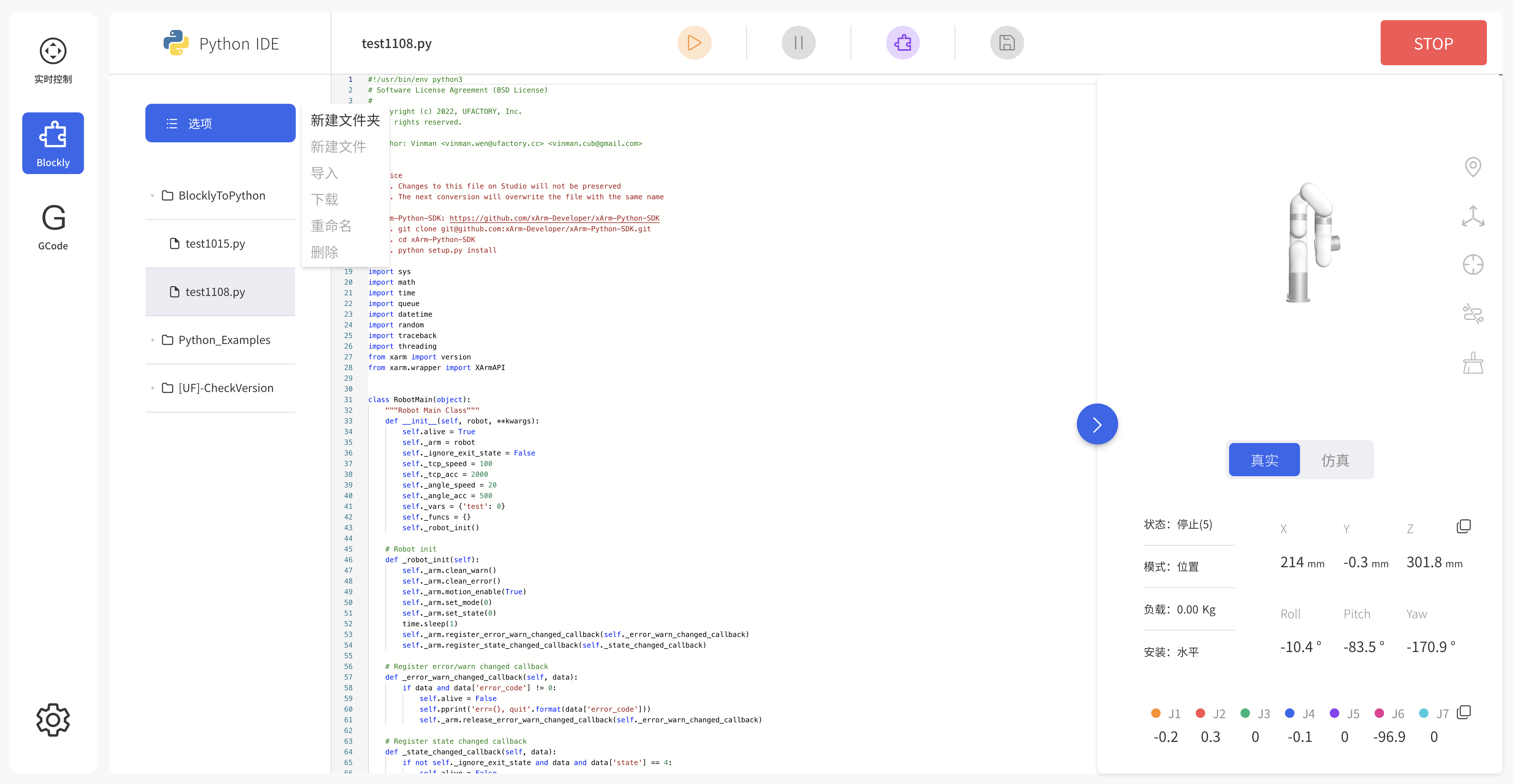
点击选项,或右键项目,可新建文件夹、新建文件、导入文件、下载文件、重命名文件、删除文件,图标功能与Blockly相似。