8. Blockly典型示例
在UFactory Studio中Blockly内置了几个例子,可以参考例子进行编程。下面介绍其中几个较有代表性的例子。
8.1 xArm机械爪的使用
该Blockly程序在示例程序[UF] - 1007_xArm_Gripper。 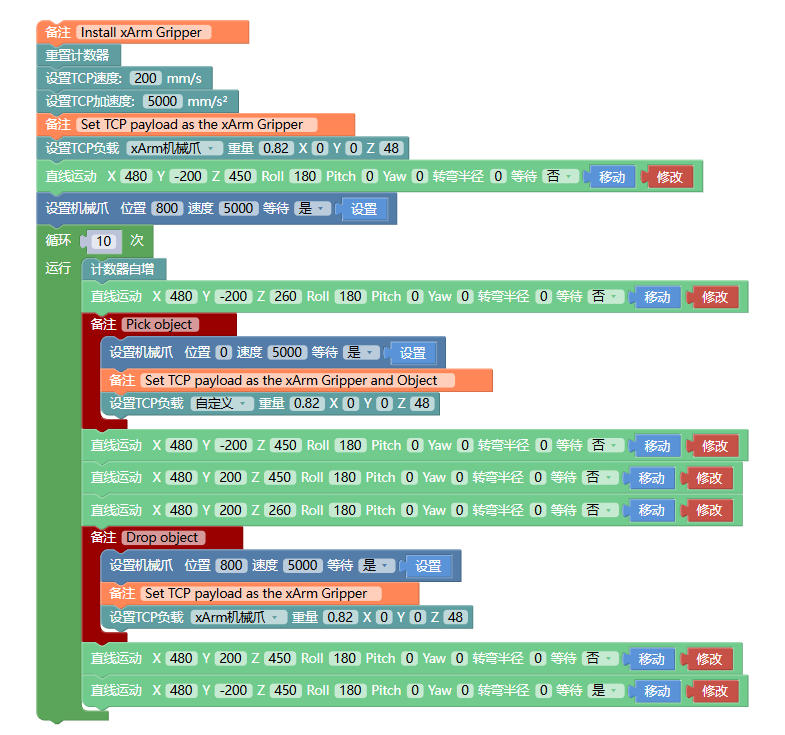
这段程序的作用:执行此程序,可控制机械爪在指定位置夹取目标物,然后将目标物放到特定的位置。
设置TCP负载:该指令在上述程序中使用多次,其主要目的是动态改变负载,适应机械臂在夹取和释放物体的过程中TCP负载的变化。
8.2 xArm真空吸头的使用
该Blockly程序在示例程序[UF] - 1008_xArm_Vacuum_Gripper。 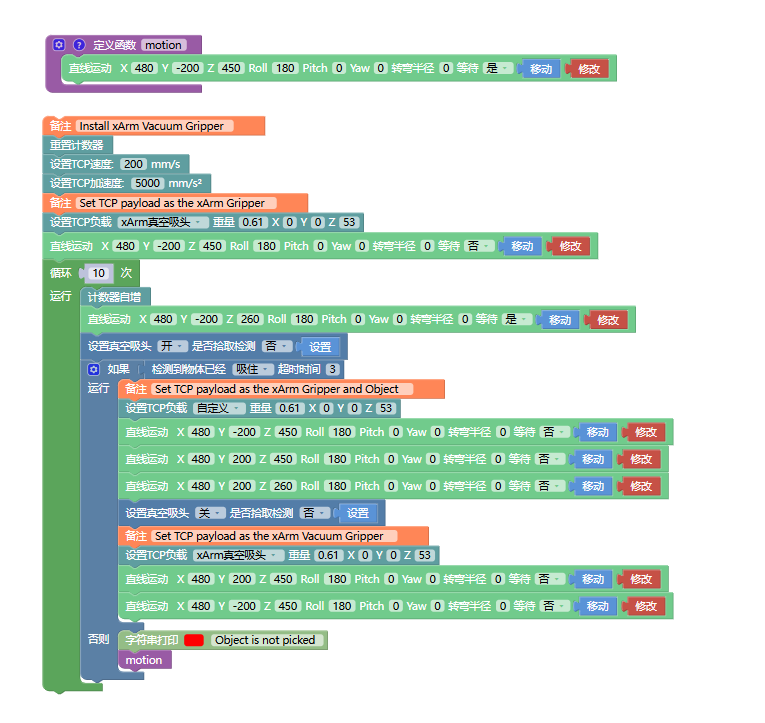
这段程序的作用:执行此程序,可控制真空吸头在指定位置吸取目标物,然后将目标物放到特定的位置。
- 定义的函数要放在主程序的前面,如上图所示。
- 主要指令: 设置真空吸头(开/关):可设置真空吸头开启和关闭状态。
- 是否拾取检测=是,同时检测了是否吸住物体,如果没有吸住物体,将会跳出整个程序;
- 是否拾取检测=否,不检测是否吸住物体。
检测真空吸头已经(吸住/释放):检测真空吸头是否吸住(释放)物体,若检测到真空吸头已吸住(释放)物体,则跳出这条指令,执行下一个指令,如果超过了超时时间后,真空吸头还未吸住(释放)物体,则也会跳出该指令,执行下一个指令。
循环运动计数: 通过添加计数器自增,机械臂每次执行到该指令时会使控制器的计数器自增1。可用于计算机械臂实际循环执行的次数。
重置计数器: 该指令将控制器内的计数器重置为0。
8.3 控制器数字IO的使用
该Blockly程序在示例程序[UF] - 1010_Digital_IO。 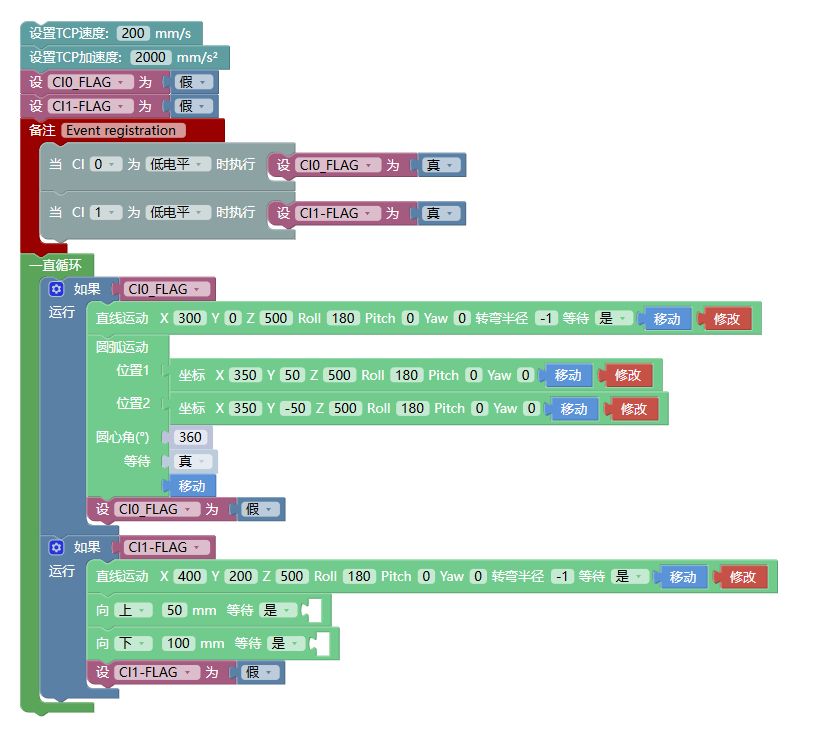
这段程序的作用:可以通过触发数字IO,来执行相应的运动。CI0和CI1默认为低电平,当程序检测到CI0或CI1跳变为高电平时,改变变量值,从而触发一直循环中的如果事件,触发后重置变量值,达到触发一次CI则运行一次相应动作的效果。